2024.03.26 お知らせ


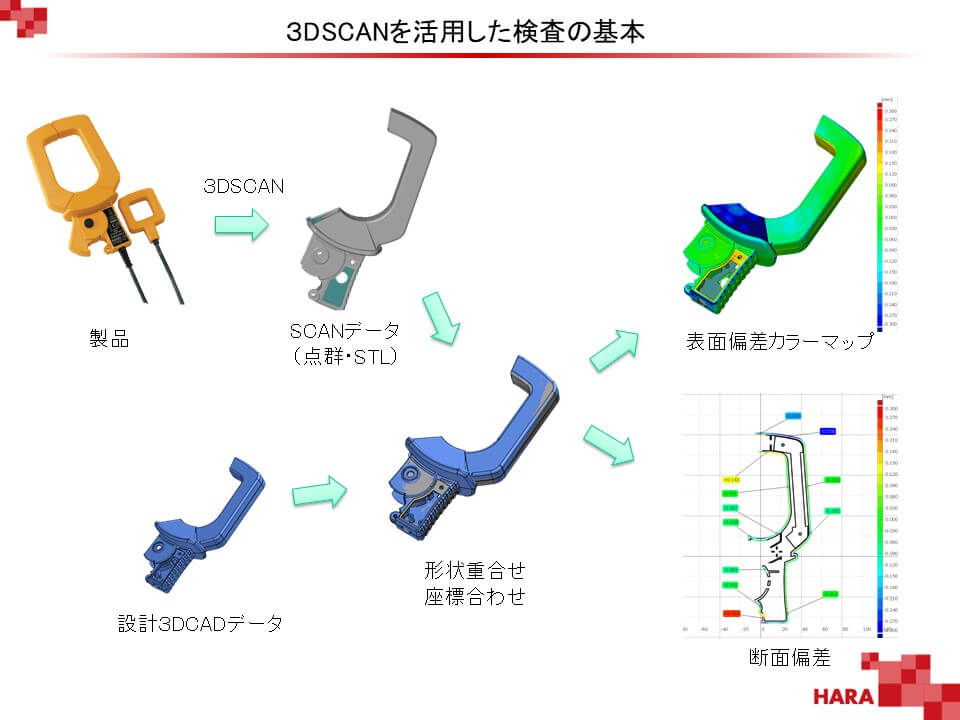
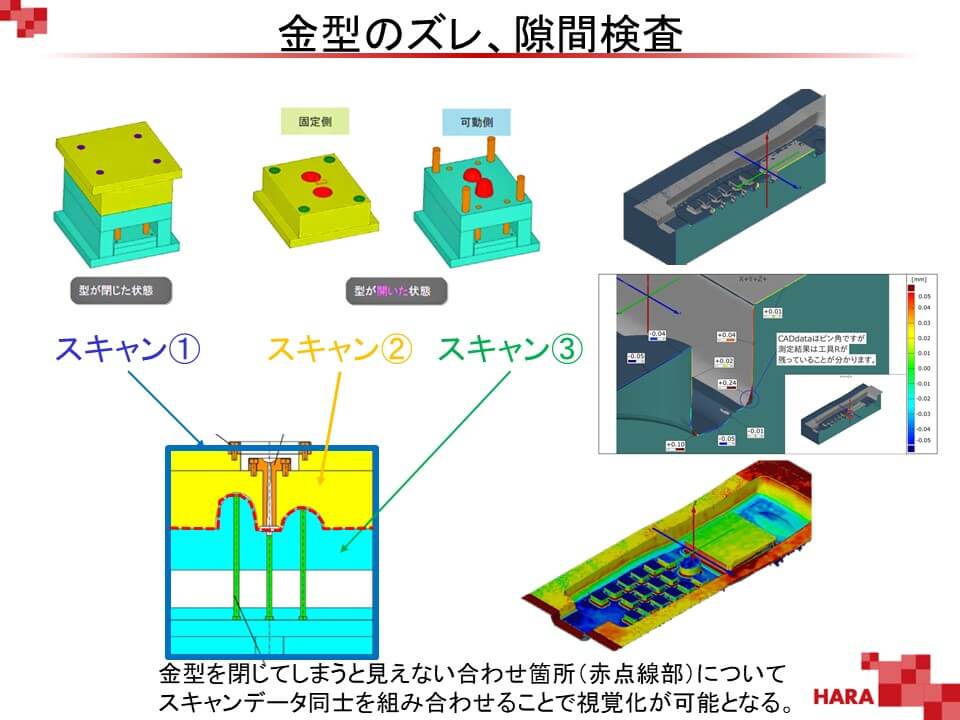
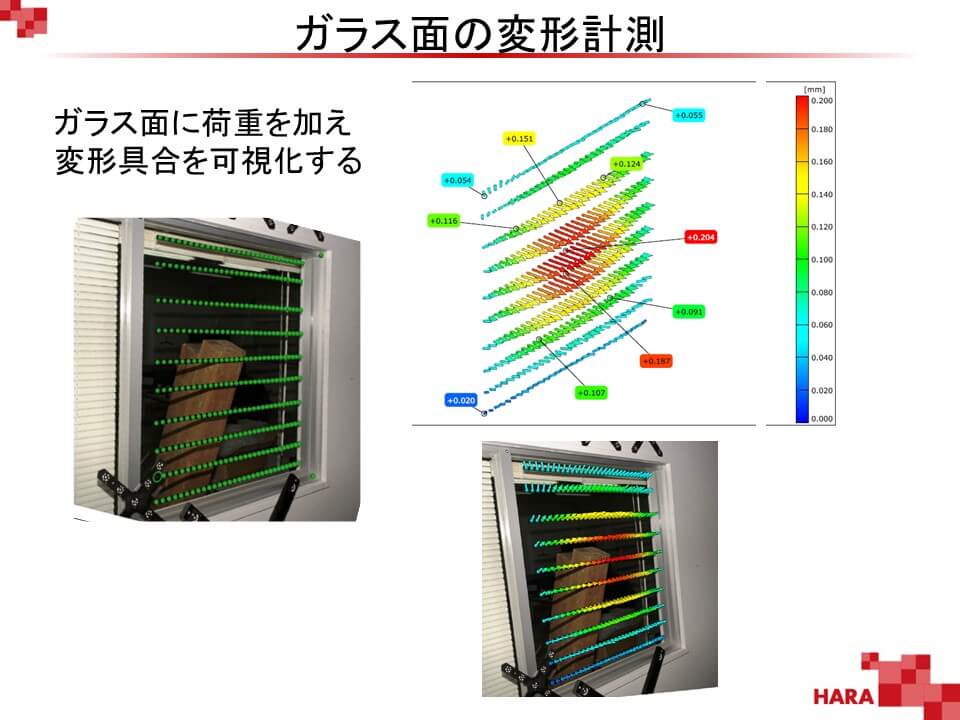
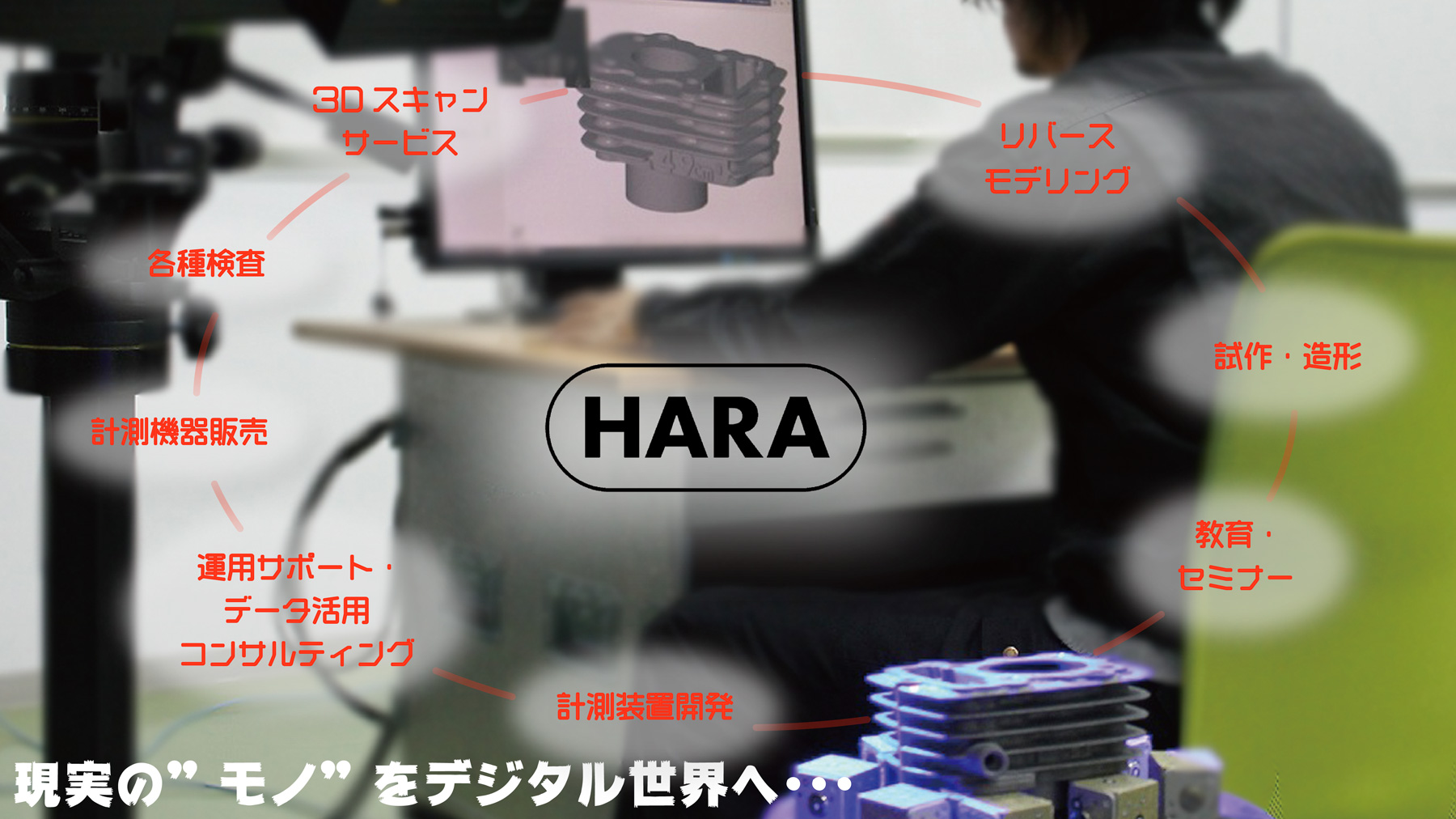
私たちは、高精度3Dスキャン、レーザートラッカ―計測、3DCADモデリング、3D形状検査までワンストップソリューションを提供しております。
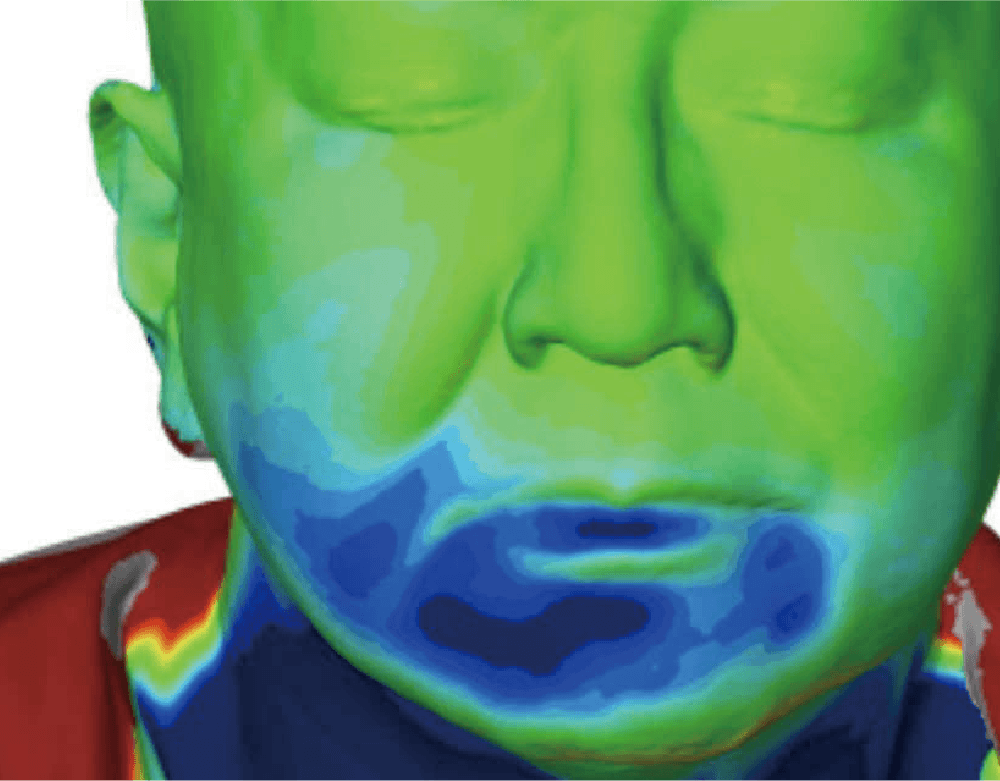
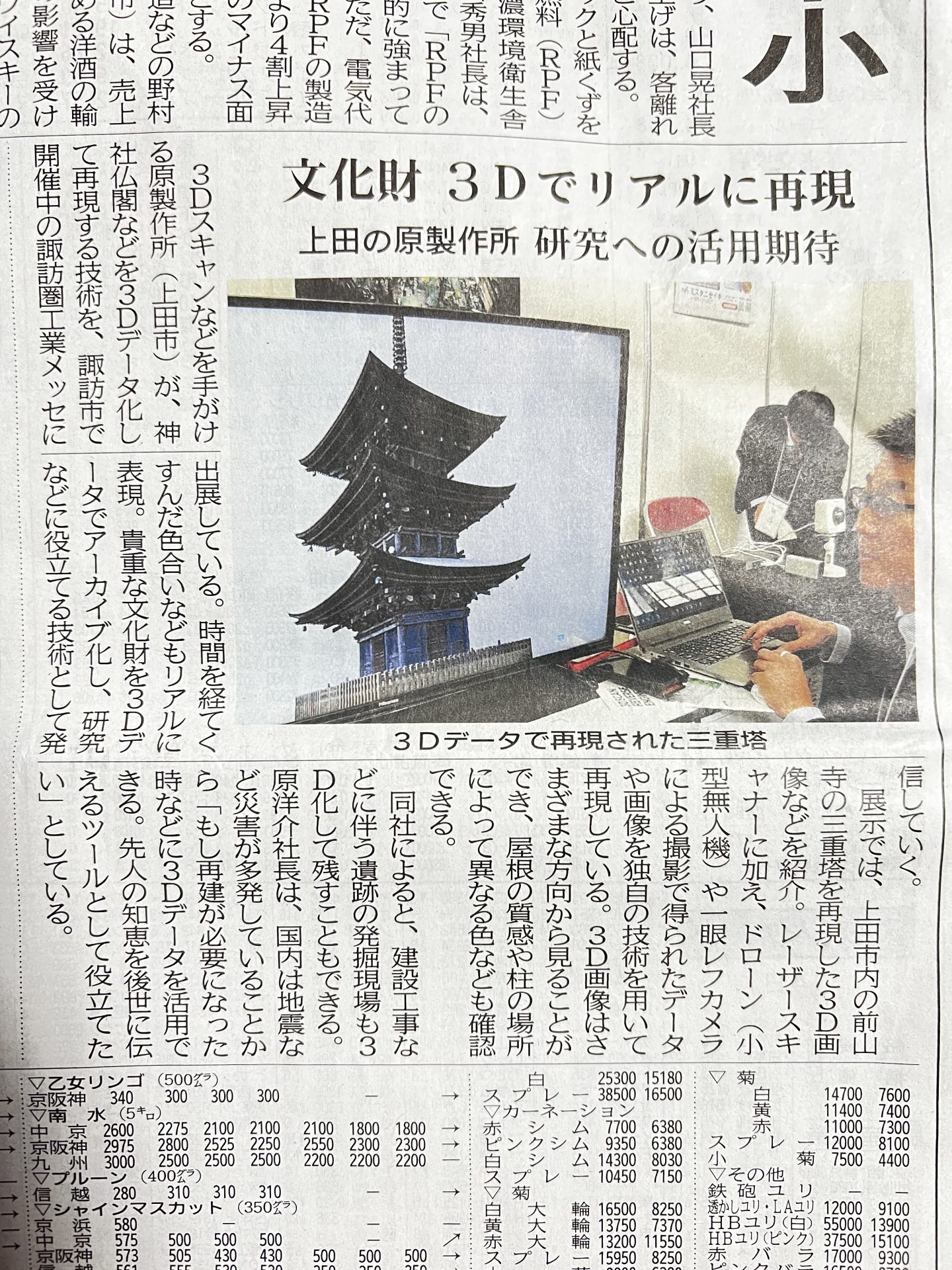
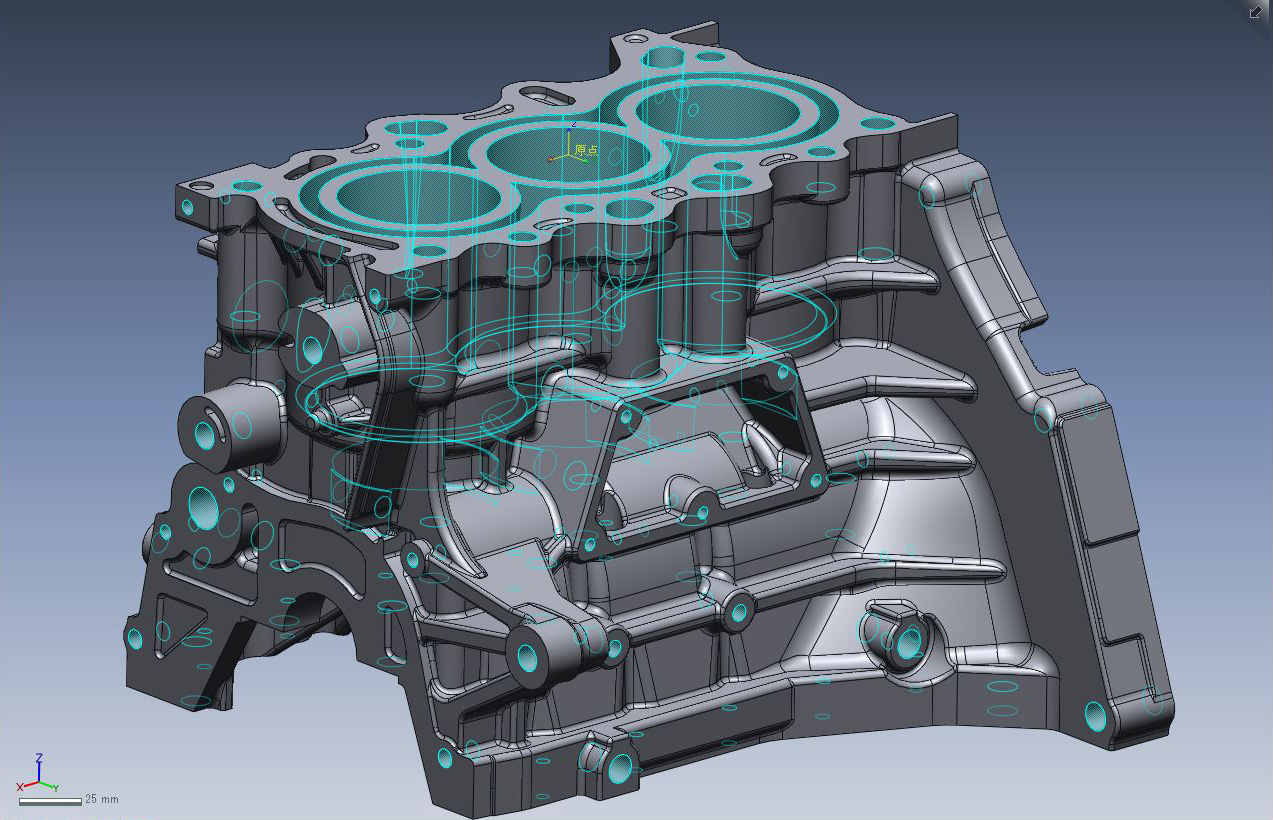
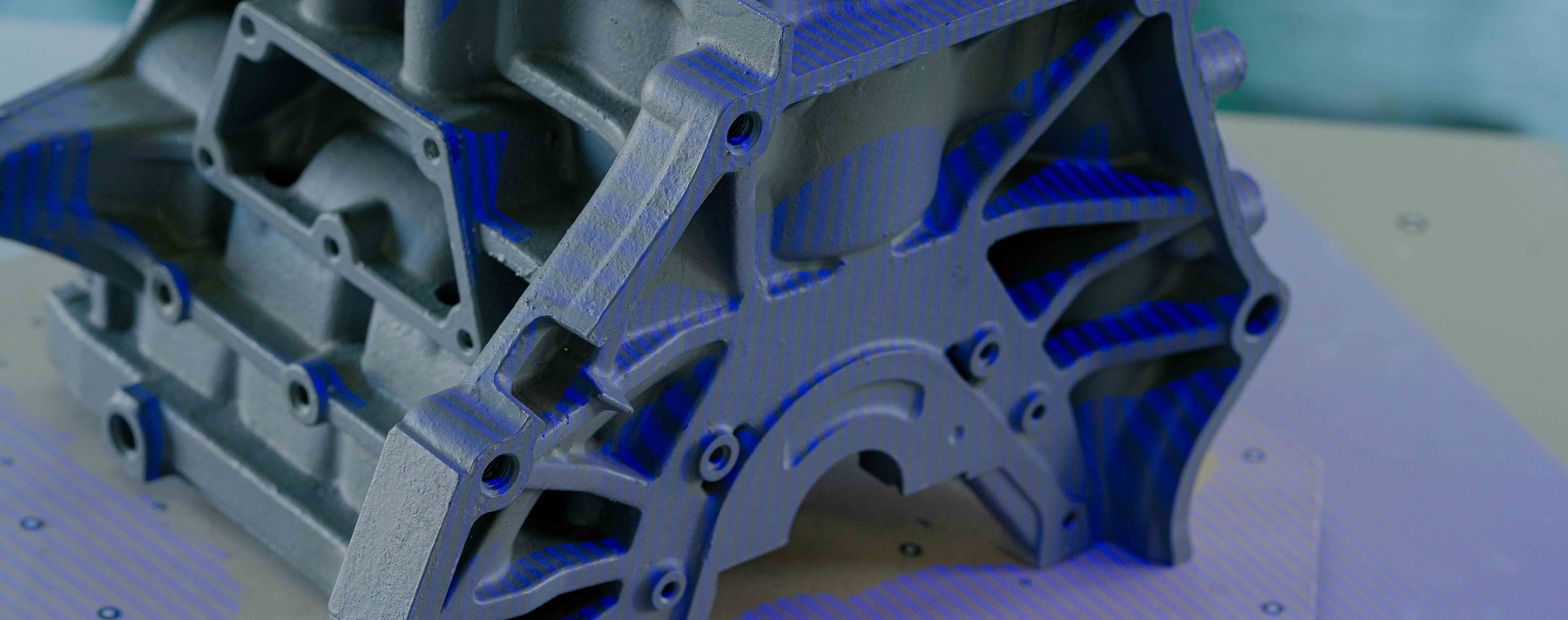
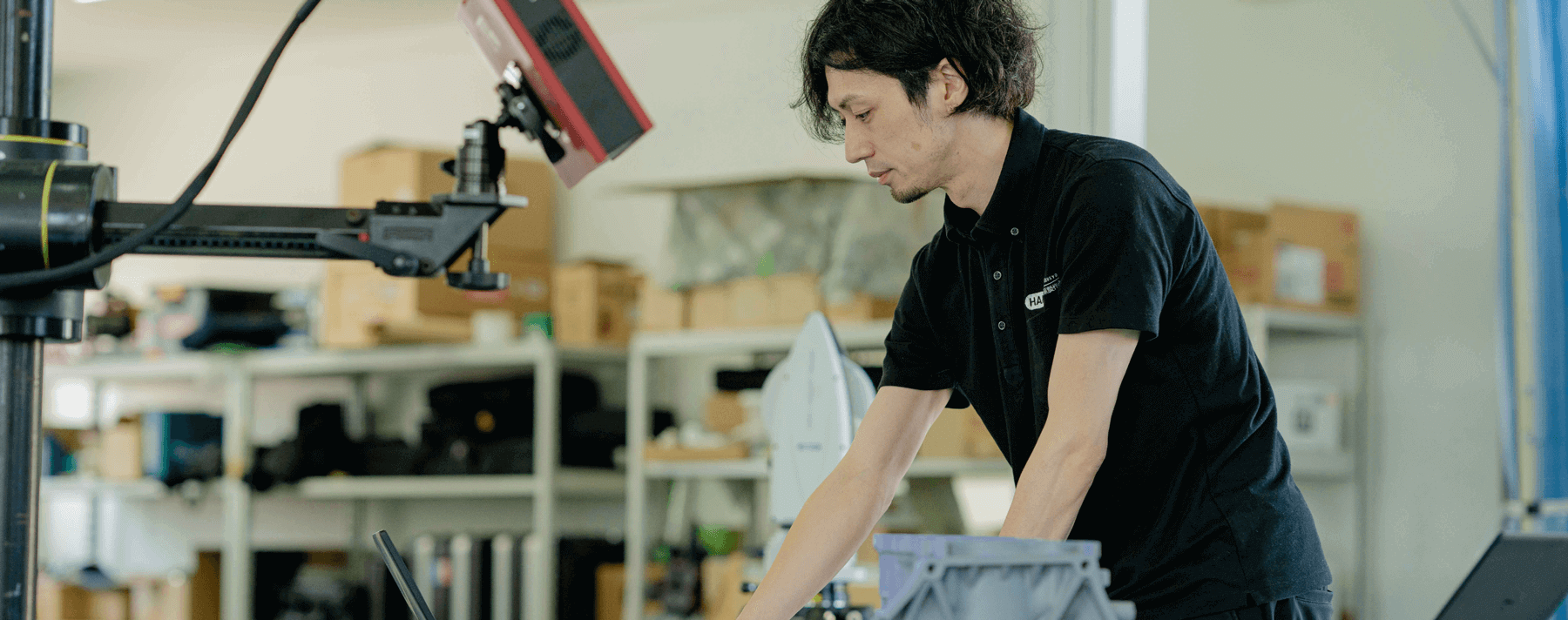
独自の高精度・高精細3Dスキャン技術を生かしあらゆる立体形状の3Dデータ化を行っております。
大きくて動かせない、機密上持ち出せない等の測定ワークについては全国へ出張計測も対応しています。

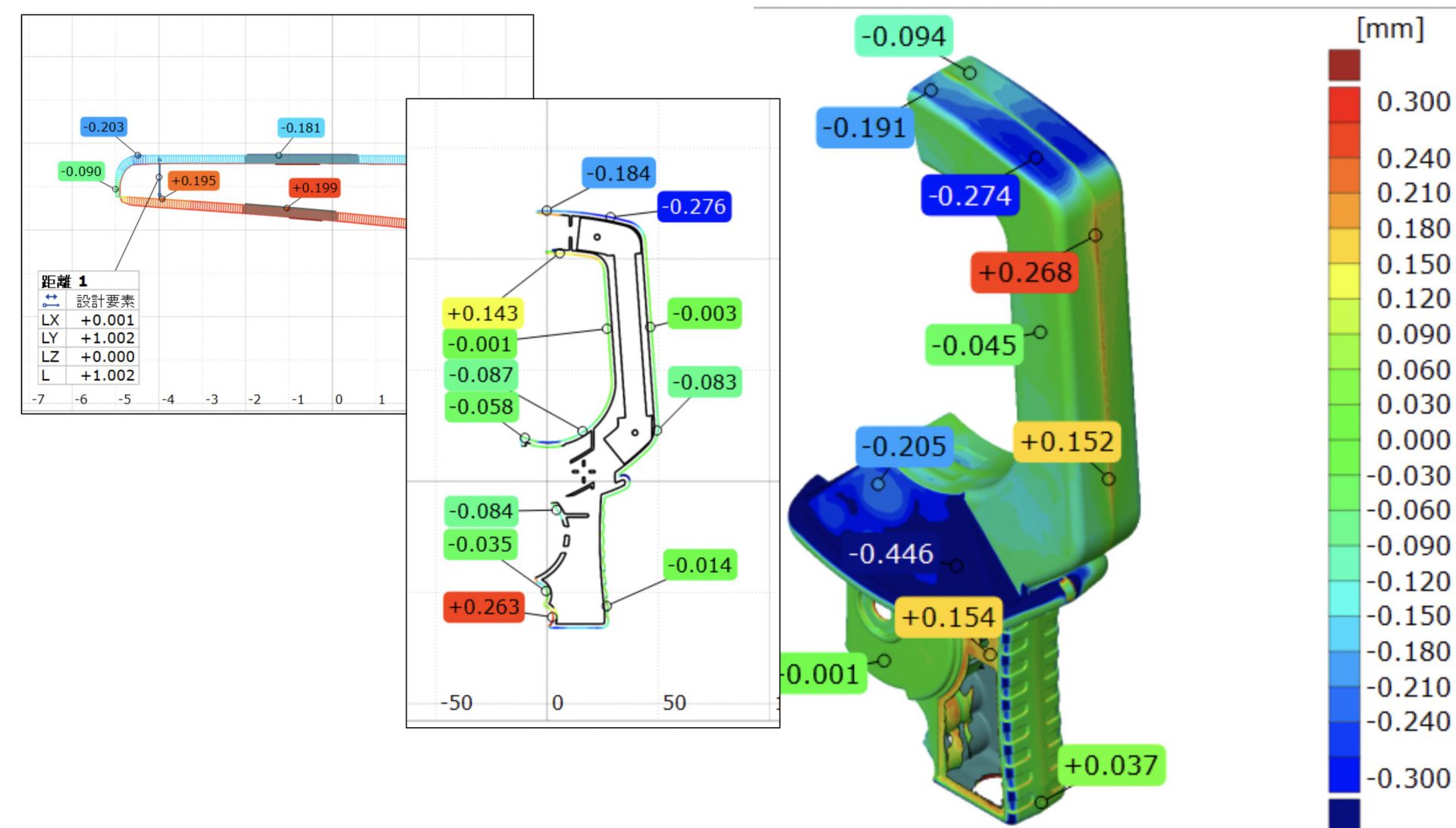
業種や測定方法でカテゴリー分けを行い、形状検査や3DCAD化、リバースエンジニアリング、試作造形に関する様々な具体的事例をご紹介いたします。