原製作所は高精度3Dスキャン(非接触三次元測定)・3DCADモデリング・3D形状検査・レーザートラッカー計測を主体とするリバースエンジニアリング専門会社です。3DCADモデリングは高度な技術が必要なため、原製作所が最も得意としているサービスです。弊社での保有機器は、ATOS、TRITOP、Leica Laser Trackerなど業界で最前線を行く機器を多数保有しています。リバースエンジニアリングのことなら原製作所にお任せください。
TRITOP
非接触光学式3次元点位置測定システム
TRIROP (GOM社製)

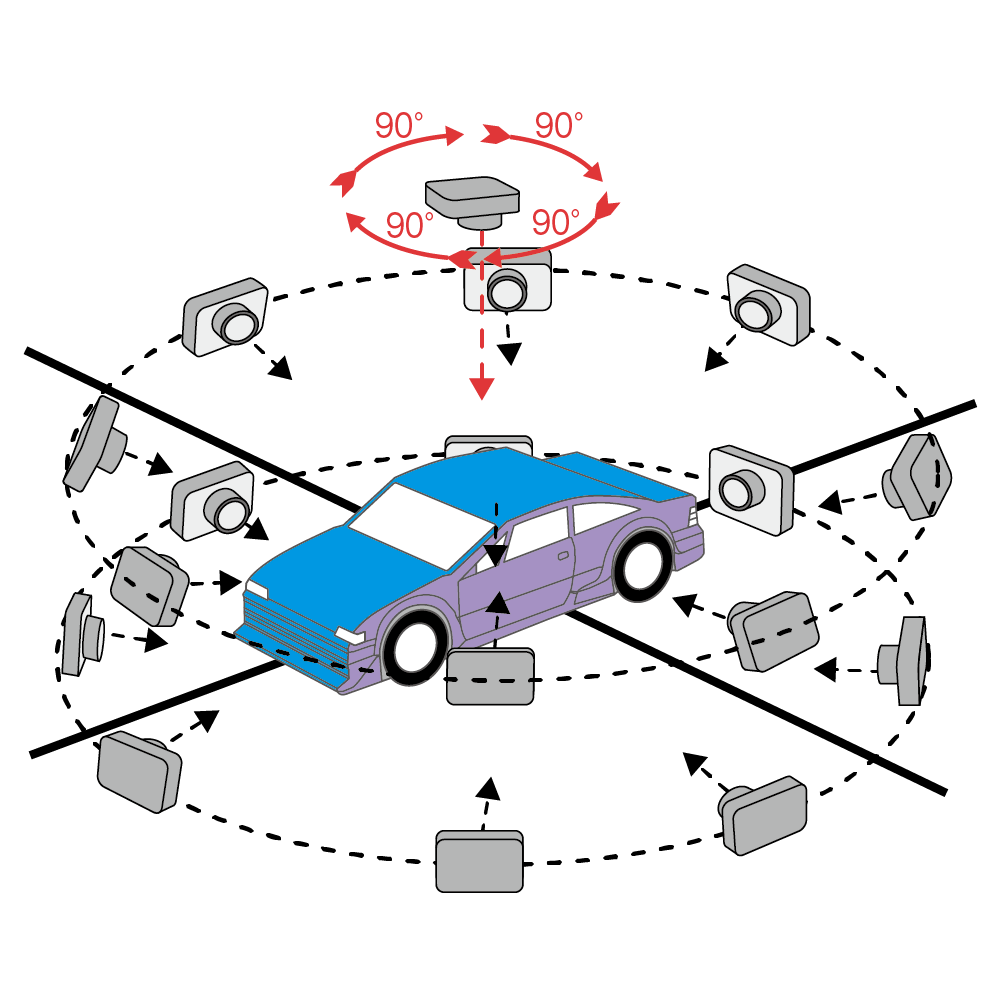
変位量を得たい箇所にマーカーを貼り、周辺にコード化されたマーカーを配置します。
変形前と変形後をデジタル一眼レフカメラを用いてそれぞれ撮影することで、コード化されたマーカーの3次元座標とカメラ撮影位置を算出し、次に対象物上の全てのマーカーの3次元座標を算出します。得られた3次元座標値を変形解析機能を使用して比較する事で、マーカーの変位量解析を行います。
TRITOPはATOSと併用が可能です。
ATOS単体では2000mmを超える場合、画像合成時の誤差が大きくなります。その誤差を打ち消すためにTRITOPを使用し精度を保ちます。
| 測定範囲 | 測定精度(参考) | 点間ピッチ | 推奨ワークサイズ | 参考ワーク |
| ー | 自動車一台で±0.1mm程度 | ー | 1.5m~10m | 航空機、船舶、重機、自動車ボディー |
2m以上の測定物の場合、ATOSとTRITOPを組み合わせて測定を行います。
組み合わせた場合、測定精度はATOS精度+TRITOP精度となります。
*横にスクロールしてご覧ください。